A collection of tasks built with mjlab, starting with ports from MuJoCo Playground.
| Task ID | Robot | Description | Preview |
|---|---|---|---|
| Getup | |||
Mjlab-Getup-Flat-Unitree-Go1 |
Unitree Go1 | Fall recovery on flat terrain |  |
Mjlab-Getup-Flat-Booster-T1 |
Booster T1 | Fall recovery on flat terrain |  |
git clone https://github.com/mujocolab/mjlab_playground.git && cd mjlab_playground
uv syncTrain a task:
uv run train <task-id> --num_envs 4096Play back a trained policy:
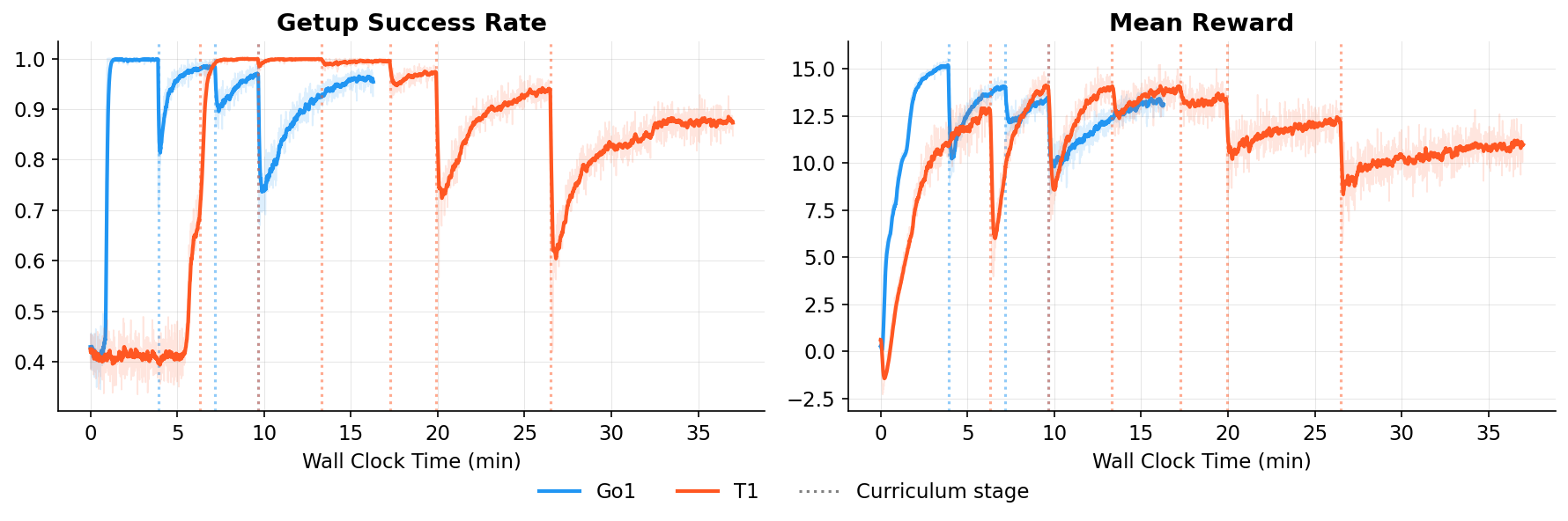
uv run play <task-id>On a single NVIDIA 5090, the Go1 getup task converges in ~2 minutes and T1 in ~8 minutes, but we continue training with a curriculum that progressively tightens action rate, joint velocity, and power penalties to produce smoother, safer policies.
If you use this repository in your research, consider citing mjlab:
@misc{zakka2026mjlablightweightframeworkgpuaccelerated,
title={mjlab: A Lightweight Framework for GPU-Accelerated Robot Learning},
author={Kevin Zakka and Qiayuan Liao and Brent Yi and Louis Le Lay and Koushil Sreenath and Pieter Abbeel},
year={2026},
eprint={2601.22074},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2601.22074},
}This repository is released under an Apache-2.0 License.